For orders contact e-mail: i.berca@joulemotors at eu
Specifications
Continuous power: 120kW*
Max power 150kW
Max Voltage: 430Vdc
Peak Current: 520A
Continuous output current: 380Arms
Max Efficiency >98%
Weight ~ 4,5kg
SD card black box for controller data analysis, via CAN dongle
Wi-fi telemetry via CAN dongle.
All settings can be user customized. Hardware and software can be also customized according to the client needs.
The controller is using high end Infineon power module making it one of the best efficiency on the market.
Communication: CANbus, serial, SPI, usb for proggraming, open source software based on VESC
Safety: double independent hardware over-current protection. Monitors all phase currents, DC bus voltage, 3 base IGBT temperature monitors. Short circuit protection with gate driver level DESAT protection implemented.
* With stock cooling it can sustain 120kW continuous, for higher power larger radiator is needed.
SD card black box for controller data analysis, via CAN dongle
Wi-fi telemetry via CAN dongle.
All settings can be user customized. Hardware and software can be also customized according to the client needs.
The controller is using high end Infineon power module making it one of the best efficiency on the market.
Communication: CANbus, serial, SPI, usb for proggraming, open source software based on VESC
Safety: double independent hardware over-current protection. Monitors all phase currents, DC bus voltage, 3 base IGBT temperature monitors. Short circuit protection with gate driver level DESAT protection implemented.
Generates maximum torque per amp across the full range of current and temperature by modifying the proportional and integral gains every cycle to match the direct and quadrature inductances as well as stator resistance in real time.
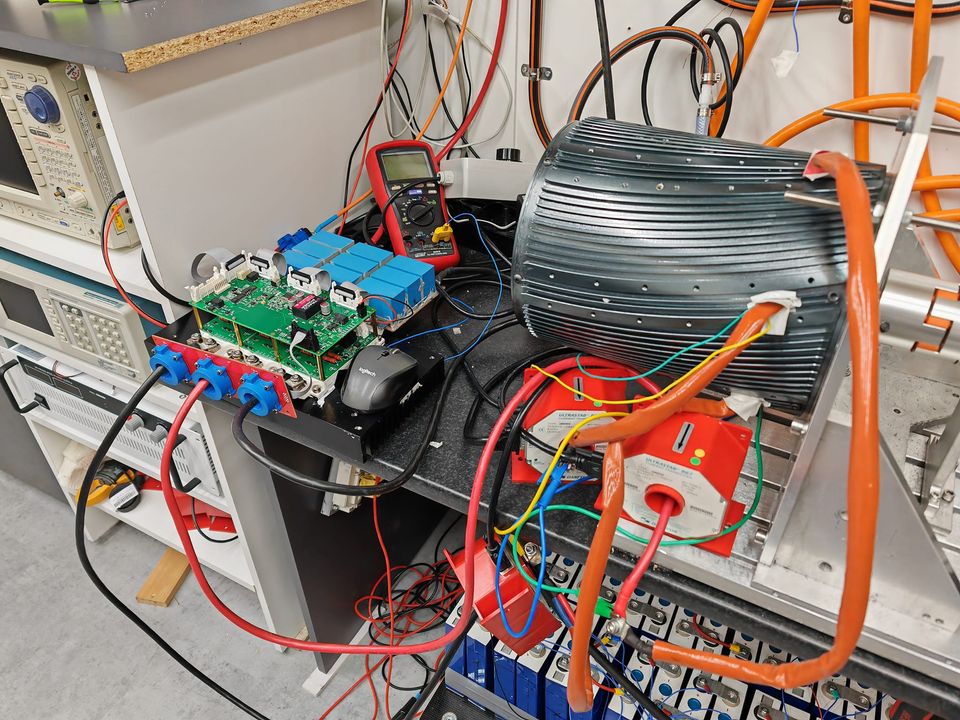
Our test bench has a new isolated 16 channel 10Ms recorder to record all the parameter of both motors and controllers.
We are capable to test virtually any motor, even expand our test bench to 5000Nm and 1000Amps.
Rotor slice with custom magnet shape and grade N45UHMagnets skewing is implemented for a perfect sine-wave Back EMF, and the best efficiency possible. The magnet optimum skewing angle formula is : Δα = optimum magnet skewing angle P= nr of magnets Z= nr. of slots. Example for my motor 60 slot 10 pole: Δα = (360/20)-(360/60)= 18-6 = 6 degre skewing is ideal for zero cogging torque.New arrived tool with isolated inputs to allow to measure switching losses for each transistor. This is very important, I`m using it to fine tune the controller switching timing, and measure the switching losses. Contrroller Vesc Based softwareMeasured motor efficiency matches within 0.2% of the simulations valueTorque Vs Speed combined with efficiency map I use 0.2mm thick lamination to achieve highest efficiency on the market, above 97,3%. Motor housing ready first 4 motorsInner cooling ring being machined
Efficiency analysis between an IGBT controller and a mosfet controller
Motor/ Inverter connection diagram. I used the second motor as a generator and to dump the energy i used water heaters seen in a picture below. I use a state of the art Power Analyzer PA3000 from Tektronix with 0.04% accuracy.
My small setup for testing motors and controllers, I have a very precise torque sensor with 0,1% accuracy Range is 0-500Nm and up to 8000 RPM
Paul Open source controller test results, using water cooling plate and 400AMP IGBT modules. Encoder angle was fine tuned until i got the best performance. Advanced angle Id current was adjusted but without any practical improvement.
Orange wave is phase voltage, and green line represents the current. Using Paul Open source controller
Even at low loads the efficiency parameters matched the simulation parameters in FEMM the software model. Results using Vesc controller using in sensorless mode. As we can observe the inverter efficiency is much better since is using mofets instead if the IFBT`s. The drive PWM frequency was set to 20khz. The motor efficiency is also better because the sinewave generated is much closer to a pure sinewave. The torque per amp constant in this case was better from 0,14Nm/Arms to 0,22Nm/Arms
Open source controller used to run my RED 130 motor in sensorless mode
Vesc open source controller driving the motor in sensorless mode.
The controller has automatically detected all the motor parameters including: Internal resistance, Inductance, Flux Linkage, Kp, Ki and observer gainWaveforms for all the 3 phases and the currentsVoltage Harmonics. As we can observe due to very careful slot pole design the third and the fifth harmonic are very small, negligible
Prototype production phase done. Testing phase starting. Production phase started.
1. Introduction:
First BLDC motor was developed in 1962 by T.G. Wilson and P.H. Trickey unveiled what they called “a DC machine with solid state commutation”, it was basically because solid state thyristors appeared on the scene. A permanent-magnet synchronous motor (PMSM) uses permanent magnets embedded in the steel rotor to create a constant magnetic field. The stator carries windings connected to an AC supply to produce a rotating magnetic field. At synchronous speed the rotor poles lock to the rotating magnetic field. Permanent magnet synchronous motors are similar to brushless DC motors. The difference between BLDC and PMSM is that BLDC is driven by square waveform and PMSM is drive with a sine wave current. These motors require a variable-frequency motor inverter, ESC, Frequency inverter.
With a strong background from Polytechnic University, Faculty of Electrical Engineering, electrical machines discipline, I started 10 years ago to modify some BLDC motors, and then designing my own.
After making my own electric car conversion Opel Agila: https://youtu.be/y1orjHGmjeo, i got enough experience to understand what are the motor needs for an electric car.
A motor should have high range of RPM and high peak capacity to be able to keep the car in one (gear) second or third, and have 120km/h at 7000RPM for example. Many simulations were done until the final version (after about 50 simulations with various magnets sizes, angles, dimensions, stator tooth sizes and shape, and different winding configuration. To be able to have a very small cogging torque and a sinewave back EMF the motor is consisted in three rotor slices with 3 degrees skewing; this also reduces harmonics and eddy currents losses in the magnets. The motor will work with sensorless sinewave controller or using resolver/ encoder.
2. Motor sizing, slot pole count:
To decide what is the best motor for your application you need to take in account many of aspects.
You start from the power, speed and torque needed.
There are many type of motors good for a car conversion ( DC motors, AC motor, Permanent magnets motors (PMSM), Hybrid PMSM ( less magnet material and increased use of reluctance torque), Switch reluctance motor (no magnets, no clogging torque high efficiency, some disadvantages not high start torque, noise and vibrations )
For example BMW i3 has a hybrid design between PMSM and switch reluctance motor, by still using some magnets, they where able to create one of the best electric motors on the market.
Higher RPM motors native offer higher power density, because for higher speed you do not need in increase the size of the motor, only for the torque and since the power of a motor is torque multiplied by speed you gain power easy in this way. Mechanical power at the motor shaft equation : P[W]=Speed [RPM] * Torque [Nm] / 9.55
If a motor has 65kw of mechanical output power the electrical power needed is bigger because of the efficiency. For a car a 60-65kW is enough to have good acceleration.
I decided to use 60 slots and 10 poles because this combination is offering 5 symmetries, and high winding factor. 0.966), if you use 12 poles then the frequency becomes to high and the motor eddy currents losses become to high, GM is using the same slot pole combination Chevrolet Volt, also many other producers.
We can say that for a higher torque we need more magnets, but also keep the frequency lower than 400-500hz, because higher magnets count will create higher frequency.
Motor Frequency calculator : f[hz]= Pole count (magnets nr.) x RPM / 120 Example: this motor has 10 magnets and 7000rpm then f=10×7000/120 = 583Hz.
For this frequency is imperative to use high frequency lamination in the stator like NO-20 or equivalent. Thinner lamination will offer lower eddy currents losses. The thickness for this frequency should not be higher than 0.3mm
3. Choosing the Materials:
Even if in the last 50 years the PMSM motor theory remained basically unchanged, the big improvement was in the materials area, especially in the magnets. This days the magnets are very powerful, and this allowed for very high motor densities to become a reality. Also with the use of thinner and thinner silicon steel laminations the frequency of the motors was increased 10 times versus of a conventional AC motor that runs at 60 or 50hz, this resulting in very high RPM and many pole pairs. For example regarding this motor a NO-02 material in the stator (0.2mm thickness) compared with M235-35A materials witch is 0.35mm thick, will give an improvement of 0.5% in efficiency, which is quite a lot can mean 400w of less power dissipation.
Neodymium Iron Boron is an alloy made mainly from a combination of Neodymium, Iron, Boron, Cobalt and of other transition metals and with varying levels of Dysprosium and Praseodymium. The exact chemical composition within NdFeB depends on the grade of the NdFeB magnet. Dysprosium and Praseodymium are added to improve the Hci (Intrinsic coercivity) of the “Neo” magnets.
Stronger magnets produce more torque so more power in the end. I decided to have N42UH magnets with phosphate coating, Stronger than N42 can not sustain high temperature operation so i stop at N42.
4. Motor topology, calculations and simulations:
To be able to calculate and determine all the parameters of the motor a simulation software is needed, they are extremely expensive unfortunately.
Even with a tool to simulate the motor, you still need to know and understand all the parameters, to determine best motor topology for certain application, so is almost pointless for somebody to try the software if there is no university background for electric motor like me for example.
The software can determine many parameters, but it can determine them well if you feed with the correct data, correct materials and correct assumptions.
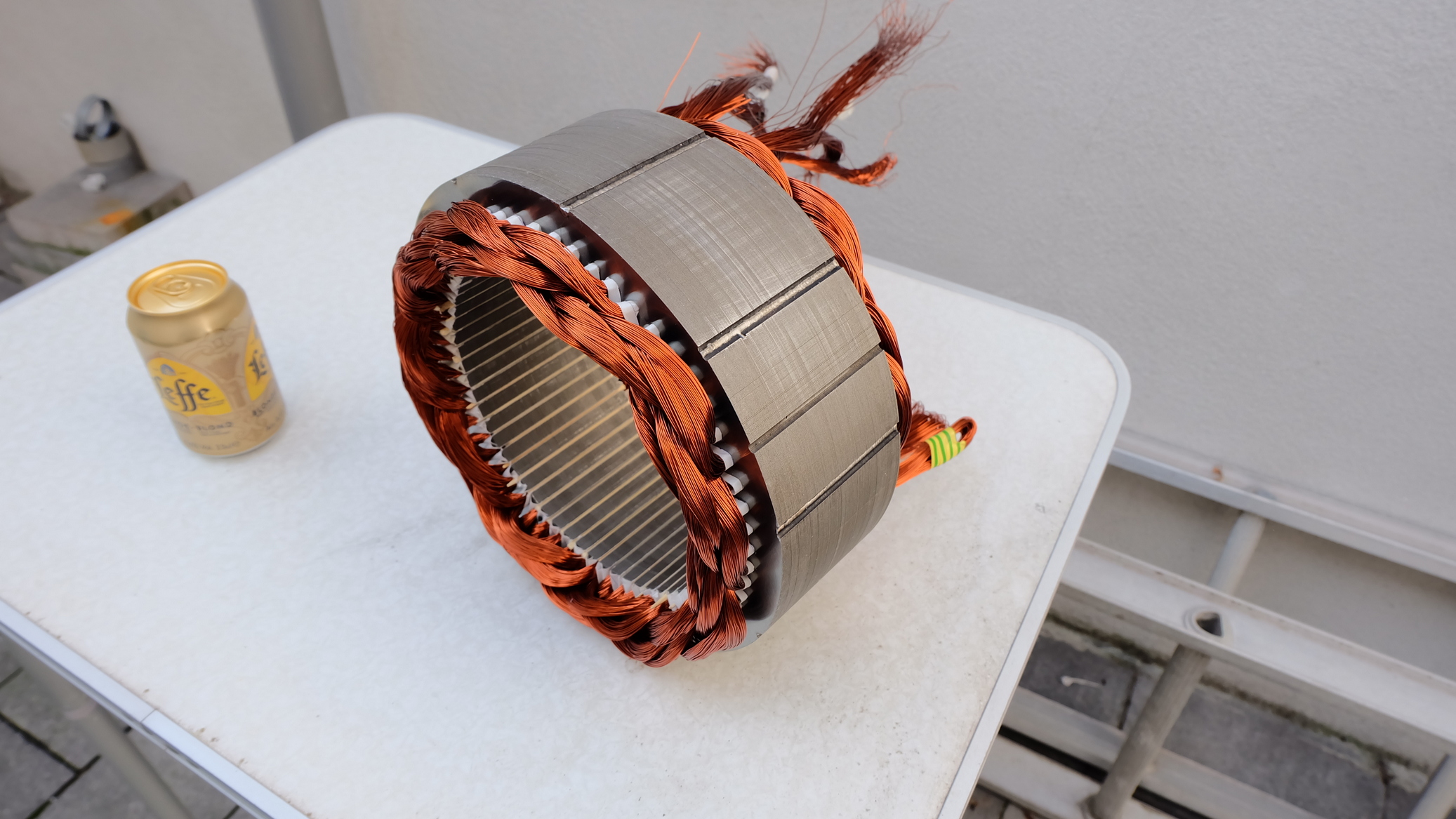
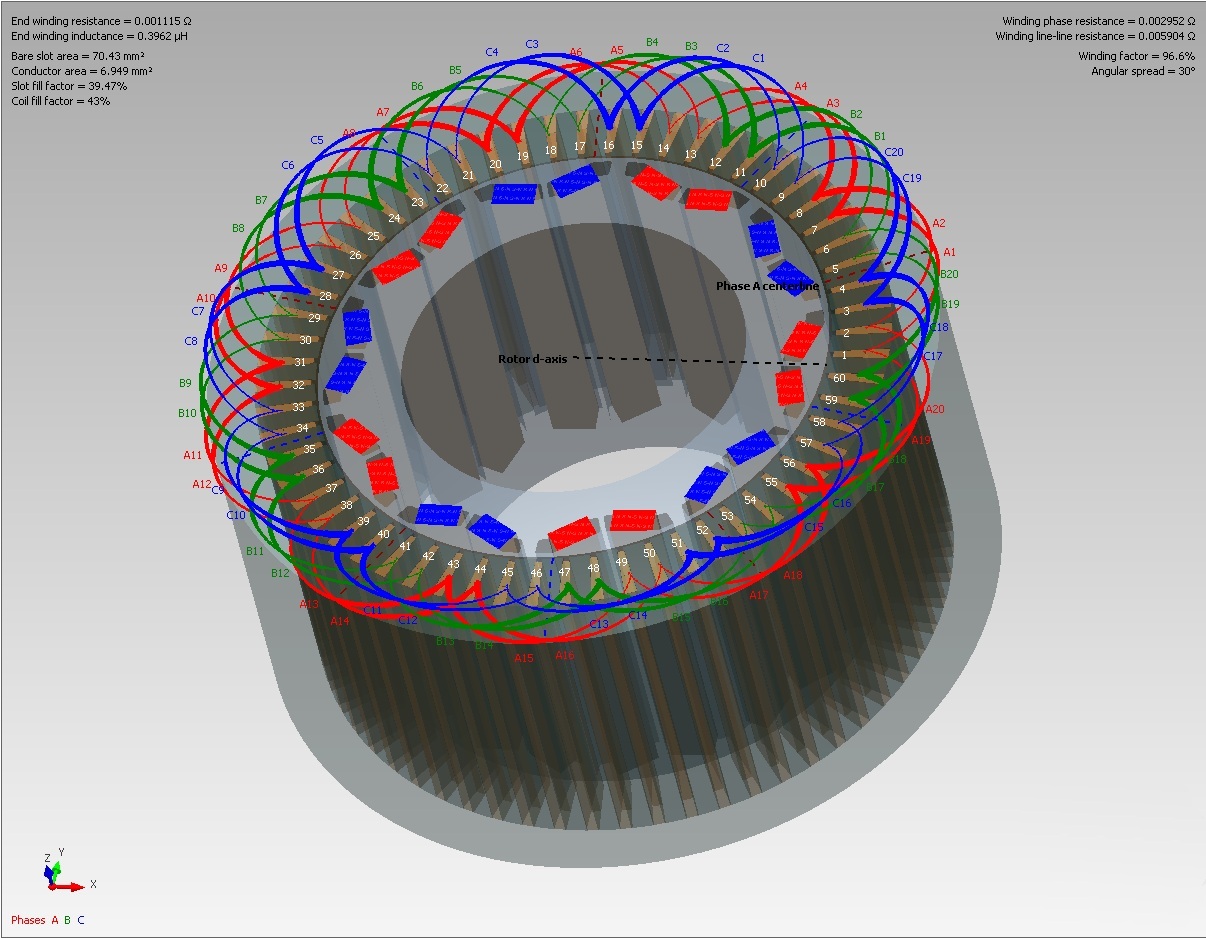
Underneath is the 60 slot and 10 pole model with transparent core to be able to visualize the coils and magnets.
Mechanical analysis is done in a separate program to evaluate the centrifugal forces that tend to throw the magnets outside the rotor.
This test is very important because you want to make sure the magnets will not fly outside, but you also want to have them as close to the exterior with bracket as thin as possible.
My test bench setup
Skewed magnet representation:
Stress analysis. A force of 2700N was applied to each magnet in outer direction to simulate the centrifugal force produce by the rotor rotation at 7000 RPM. The limit force for the material is about 250 Mega Pascal. So we are way under the limit.
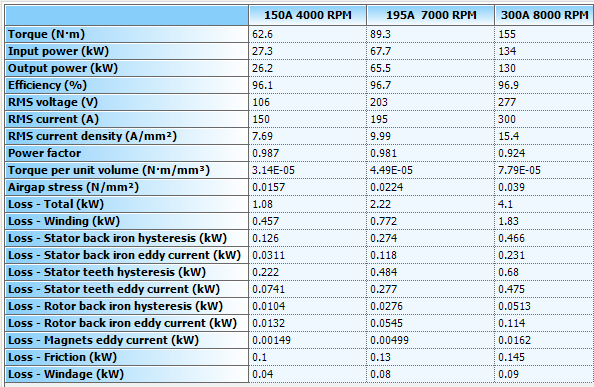
Motor simulated at different parameters and loads
Main Electrical characteristics:
Peak Power …………………………………….130Kw, 1min.
Nominal Power(S1 continuous) :……… 65 kW
Max speed: ………………………………. 8000 RPM
Supply DC bus Voltage: ………………… 280Vdc
Supply DC bus Voltage: ………………… 280Vdc
Peak Torque :………………………………………… 200 Nm
Very low cogging torque (Zero current)………….. 2,5Nm (lower than 1% of the motor torque)
Ac Supply……………………………………. 151 VAC
Turns: 2, parallel paths: 4
Mechanical Characteristics:
External diameter 292mm
length : 190mm
Weight ~ 36kg
The video represents the flux polarity, is displayed radially. As we can see the field is moving form coil to coil in front of the magnets.
The motor has big peak capability ~2x and enough iron not to saturate the core. At continuous operation the flux in the tooth and back stator is not higher than 1,5T
Winding distribution and parameters:
65kW Permanent magnet synchronous motor
Connection Type : Star
Number of parallel paths: 4
Number of turns: 4
Wire diameter 0.61mm
Number of strands in hand 23
Calculations: Conductor area is 6.75mm2 per each path. Using 0.61mm diameter wire we end up with 23wires in parralell. Since we have 4 parallel paths total conductor area will be 6.752 x 4 = 27mm2 resulting a current density of 9,63Amp RMS/mm2. With a water jacket around the motor to cool down, the motor temperature will be about 90 degree celsius from the simulations.
The efficiency map in Non linear mode took 5 hours to simulate with core i7 7700 processor. In practice we expect some variations due to the materials, and motor construction tolerances.
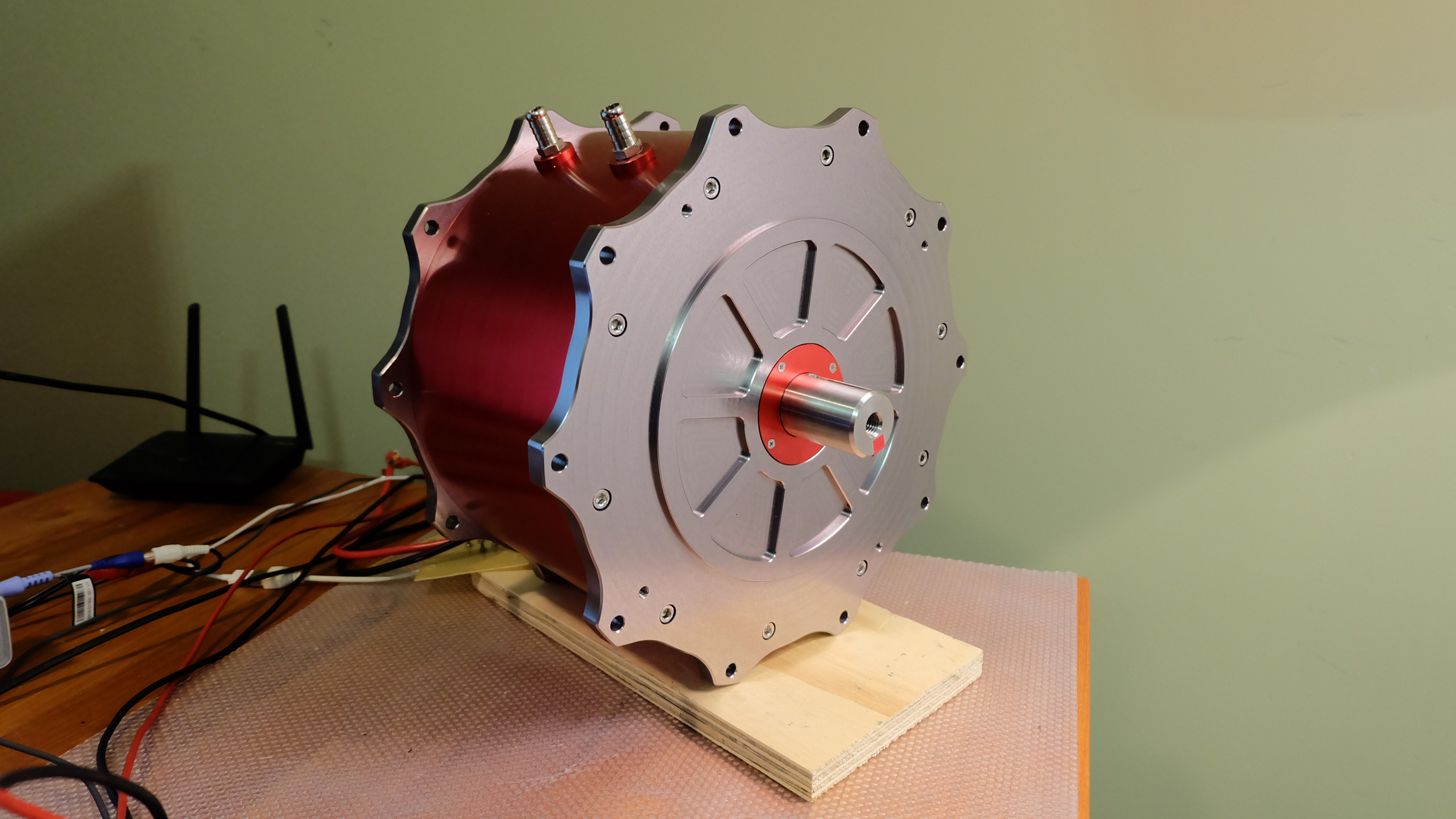
Our new motor uses in-house made parts, with best materials.
With the help of magnetic simulation software we achieved best efficiency for this class.
High temperature N35SH magnets where used.
Key points:
It can be used on electric airplanes, paraglide, large drones. It can be also used on cars or boats but with limited power, because of air not blowing on the windings.
Aviation grade Aluminum 7075
Dual winding for 120v and 240V (end user can change the coil connections).
Both delta and star connection possibility.
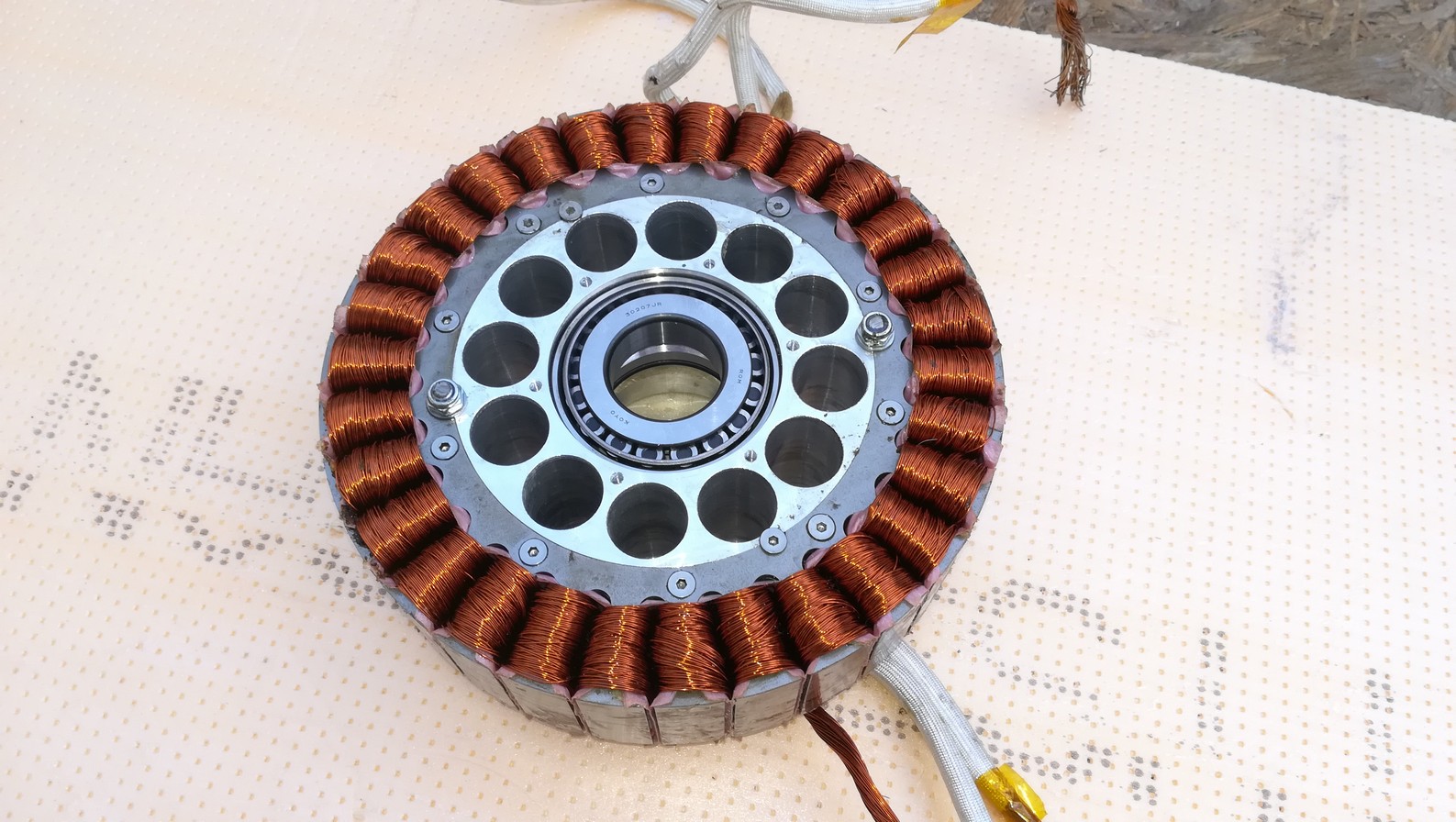
Tapered roller Koyo ball bearing for high radial-axial load (4800Kg), long life and stability.
High temperature high, coercively magnets with 150 degree Celsius maximum
Triple coil insulation with lacquer impregnation and oven curing.
Motor voltage can be made in accordance with customer request.
35 degree inclination spokes to push air into the coils.
Requests for quotations can be sent to iulian.berca@gmail.com.
Motor Specifications:
Power: 35Kw continuous, 60kw peak.
Nominal RPM: 2600.
Torque at 1200RPM 120Nm
Torque at 2670RPM 110Nm
Diameter 230mm
Total length: 95mm
Voltage 120 (parallel connection) or 240V series connection
Kv constant is 13 for 240v or 23 for 120v connection.
We can make any custom flange for the propeller or other mechanical connection.
Both bearings are whether sealed.
Bottom flange is 6xM6 on Ø82
Underneath you find the efficiency map of the motor.
My name is Berca Iulian, I`m living in Netherlands, I followed the Polytechnical University of Bucharest, Romania Faculty of Electrical Engineering and i like to build things like electric cars , scooters, bicycles, quadcopters, brushless motors and inverters (ESC or motor controllers)
I am very passionate of electronics, now i’m working to improve the brushless controller and i look to build new motors and vehicles.
I`m willing to collaborate for different projects or working in a creative company, to develop and test new technologies.
If you have any question about this constructions you can send me an e-mail at iulian.berca@gmail.com
I`m designing in Eagle-cad : brushless controller circuits, dc motor controller circuits,protection circuits,etc.
I`m constantly improving my design for a robust brushless controller, with all protection needed (overcurrent, over-temperature,fault output, torque control) also ramp acceleration and deceleration and adapting timing angle.
Now i also work on a new design of a large 48 pole 60kW direct drive brushless motor.
I`m now building new laboratory and i would appreciate any small donations for new shop materials or equipment to improve designs, and make new interesting and innovative projects.
Experiment replication to observe the thrust in EmDrive device.
The device uses a magnetron to produce microwaves which are directed into a metallic, fully enclosed conically tapered high Qresonant cavity with a greater area at one end of the device, and a dielectric resonator in front of the narrower end. The inventor claims that the device generates a directional thrusttoward the narrow end of the tapered cavity. The device (engine) requires an electrical power source to produce its reflecting internal microwaves but does not have any moving parts or require any reaction mass as fuel. If proven to work as claimed, this technology could be used to propel vehicles intended for all forms of travel including ground travel, marine travel, sub-marine travel, airflight and spaceflight.
EmDrive is a device invented by Roger Shawyer in 1999and replicate with success by a team from China led by Yang Juan and a team from Nasa this year. The device was also tested in vacuum with the thrust is sill present so the air convection or other possible air movement is ruled out.
I will replicate the experiment and try to observe the thrust.
Materials for the drive.
Cooper sheet 0.3mm (initially intended 0.6mm)
transformer from a microwave oven (power ~ 800-1200W)
Magnetron from microwave oven: Anode cathode voltage ~ 4kV , and 3-4V @13A for the filament. Frequency 2,45Ghz.
solder, 4mm screws, pcb
Test equipment: Current measurement, voltage measurement, temperature measurement, micro-gram scale.
Frustrum 3D modeling in Autocad Inventor
Connection diagram for the magnetron. Warning: charged capacitors can kill very easy. Always discharge the capacitor by putting 100kOhm resistor on the ends and also to the external case for your safety. After discharge put the ends in short circuit and wait for a couple of seconds to be absolute sure that there is no voltage.
Almost all the materials arrived today:
Today i will make the frustum to see the results.
Today after work, i will finish the setup and i will connect the frustum to a plate and suspend in the air from 4 nylon wires.
After i power on the temperature of the magnetron increased to 60 degree celsius.(140F) in around 5-6 seconds. If the magnetron does not have any load the temperature should rapidly increase i think, even though the microwave oven will not burn (overheat) if left on without any food inside.
In this paper : http://www.emdrive.com/IAC-08-C4-4-7.pdf they say that the thrust comes after 20 seconds you power the magnetron. But in 20 seconds the magnetron will be very hot without proper cooling ( or maybe because the magnetron has no load)
I still do not know if the waveguide in a microwave oven plays other role than just feed the microwave in to the cavity.
Another think i want to test is to try to reduce the current on the filament with a separate power supply in hope that i will decrease the power in “search”of some thrust.
In a few days i will receive 2 plates of PCB single-sided, and i will try them instead of cooper ends.
Today i did the first test with the setup suspended in a pendulum. The power was applied for 40 seconds. No thrust resulted 🙁
i will post the video soon.
Tomorrow i will move the magnetron above the middle of the frustum, to the small end. After power on for 40 sec temperature was 85 degree Celsius.
Next step will be adjusting the current of the filament and maybe the frequency by adding 2 separate coils over the magnets with adjustable current, to try to change the oscillating frequency.
___________________________________________
Test No. 2
Modifications: magnetron moved to the smaller side
Coil added to the magnetron to try to adjust the frequency.
As you notice in the movie the weight of the foam on the frustum is 10.2gr and real weight is 3.58gr so the lever ratio is 1:2.894 in this way the real thrust was 0.508gr.
New tests will be done with the coil to see any change in thrust.
I will modify again the frustum and add adjustable length so resonance adjustment.
I did not have time time to do any new setup. Frequency counter has arrived, and i measured 2463Mhz. . By changing the current in the coil around the magnet i will change the magnetic field created, overimpose to that of the magnet. With this change in magnetic field, the frequency output should change. I hope i can change enough to find the resonance frequency of the frustum and hope for higher thrust. The other method of finding the resonance is to adjust the length of the cavity. This can be done with a movable plate and a screw . I can make that out of PCB.
Hi, guys, i`m still alive . Sorry if i did not post anything this days. I noticed some guys think i died , relay strange. I do not have a Tweeter account by the way.
I flipped the cone in the original setup and i have the thrust downwards (scale goes positive). Unfortunately the thrust downwards is around 7 times smaller. difference on the scale is only 0.20 grams and is consistent with the power on and off .
Temperature discussion: during the tests the temperature of the frustum does not change to much maybe 1-2 degree.
The biggest change in the temperature is on thee fins of the magnetron. Can be as high as 80 degree Celsius. Definitely the air is going upward from the fins. (What is this meaning the the change in weight?) The tests shows that after power off the frustum weight is continue to decrease. up to – 0.30 grams at least. How we can explain this ?
Spring discussion:
Andy P. said something interesting : “When comparing the different thrusts, you will also have to take into account that in test 3.1 the thruster has to fight against the upward force of the spring onto which it is attached. This will lower the observed weight change on the scale, but does not necessarily mean the thrust is lower.”
This fight “against the spring” is real or not ? Lets assume this: you put 1kg on a scale and push TARE button. When you remove the weight it should not indicate -1Kg if the fight against the spring was real. Inside the scale is also a “spring” to keep the weight the the test should be the same.
I`m working the modify the cone now. Test No 4 will be with new setup.
Because i do not have a cooler to the magnetron i can not put a servomotor to continuously adjust the cavity length because magnetron will heat fast. So i will need to manually adjust the length for each test to observe the scale and then let the magnetron to cool ant test again.
First i will adjust in bigger steps 1cm smaller for each test. then i will see witch one has the most thrust. After i will go around that value from mm to mm with the screw.
I do not own the picture with the adjustable setup. is from NasaSpaceflight forum.
I hope others can make their own EmDrive and have positive results.
The method for manufacturing Neodymium Iron Boron magnets is as follows:
MELTING OF THE ALLOY UNDER VACUUM The Neodymium metal element is initially separated from refined Rare Earth oxides in an electrolytic furnace. The Neodymium, Iron and Boron and the other chemical elements are weighted and put in a vacuum induction furnace to form an alloy. The mixture is melted due to the high frequency heating.
CASTING AND MILLING In simplified terms, the “Neo” alloy is like a cake mixture with each factory having its own recipe for each grade. The resultant melted alloy is then cooled to form ingots of alloy or cooled down by the so called „strip casting process“. The alloy ingots or the strip cast faces respectively are then broken down by hydrogen depreciation (HD) and then jet milled down in a nitrogen and argon atmosphere to a micron sized powder (about 3 microns or less in size). This Neodymium powder is then fed into a container, and oriented by a magnetic field in order to allow the pressing of the so called green compacts of the magnets.
PRESSING AND ALIGNMENT IN MAGNETIC FIELD There are three main methods of pressing the powder: isostatical pressing, axial pressing and transverse pressing. Die pressing requires tooling to make a cavity that is slightly larger than the required shape (because sintering causes shrinkage of the magnet). The Neodymium powder enters in the die cavity from the container and is then compacted in the presence of an externally applied magnetic field. The external field is either applied parallel to the compacting force or perpendicular to the direction of compaction. Transverse pressing gives higher magnetic properties for the NdFeB sintered magnets. The other method of pressing is isostatic pressing. The NdFeB powder is put into a rubber mold and is put into a large fluid fled container which then has the pressure of the fluid increased. Again an external magnetizing feld is present but the NdFeB powder is compacted from all sides. Isostatic pressing gives the best possible magnetic performance for Neodymium Iron Boron. The methods employed vary depending on the grade of “Neo” required and are decided by the manufacturer. The external magnetizing field is created by a solenoid coil set either side of the compacting powder.
The individual powder particles of the NdFeB powder align with the magnetizing field that is applied – the more homogeneous the applied field, the more homogeneous the magnetic performance of the Neodymium magnet. As the Neodymium powder is pressed by the die, the direction of magnetization is locked in place – the Neodymium magnet has been given a preferred direction of magnetization and is called an-isotropic Rare Earth magnets exhibit uni-axial magneto-crystalline anisotropy i.e. they have a unique axis crystal structure corresponding with the easy axis of magnetization. In the case of Nd2Fe14B, the easy axis of magnetization is the c-axis of the complex tetragonal structure. In the presence of an external magnetizing field, it aligns along the c-axis, becoming capable of being fully magnetized to saturation with a very high coercivity.
SINTERING AND ANNEALING The Neodymium magnet is then sintered to give it its final magnetic properties. The sintering process is carefully monitored (a strict temperature and time profle has to be applied) and occurs in an inert (oxygen free) atmosphere (e.g. argon). If oxygen is present, the resultant oxides destroy the magnetic performance of the NdFeB. The sintering process also causes shrinkage of the magnet as the powder fuses together. The shrinkage gives a magnet close to the required shape but the shrinkage is usually uneven (e.g. a ring may shrink to become an oval). At the end of the sintering process a fnal rapid quench is applied to rapidly cool the magnet. This is to minimize the unwanted production of other magnetic phases. A rapid quench maximizes the magnetic performance of NdFeB. Because the sintering process causes an uneven shrinkage, the shape of the Neodymium magnet will not be to the required dimensions.
MACHINING The next stage is to machine the magnets to the required tolerances. Because machining is required, the Neodymium magnets are made slightly larger when being pressed e.g. larger outer diameter, smaller inner diameter and taller for a ring magnet. Standard magnet dimensional tolerances are +/-0.1mm although +/-0.05mm is achievable at extra cost. The possibility of even tighter tolerances depends on the shape and size of the magnet and may not be achievable. For note, the Neodymium magnet is very hard. Trying to cut holes in NdFeB with a standard drill or carbide tip will blunt the drill bit. Diamond cutting tools (CNC diamond grinding wheels, diamond drills, etc.) and wire cutting machines (EDM) have to be used. The NdFeB swarf powder produced during machining needs to be cooled by liquid otherwise it may spontaneously combust. For Neodymium block magnets, there may be cost savings in using much larger magnet blocks made by isostatic pressing and cutting them into smaller Neodymium blocks of the desired size. This is done for speed and for mass production (where enough cutting and grinding machines are present) and is known as “slice and dice”. COATING Once the final dimensions for the magnet has been met by machining, the Neodymium magnet is given a protective coating. This is usually a passivization of the surface or a Ni-Cu-Ni coating. Other coatings may be possible. It is not recommended to use the magnet without any protective layer.
After successfully building a brushless controller i have decided also to build my own brushless motor. Autocad Inventor 3D cad software was used by me to design 3D model of the motor.
Before start to design something you need to know the RPM needed,torque needed,running voltage, max Amps. This formula is for calculating the torque if you have the power and the speed. After reading the gear ratio on Opel Agila it resulted that i need a speed of 4000RPM to reach 73.4Km/h in 3-rd gear ( i do not need more than that in a city). I decided to make a reverse outrunner motor design because is more easy to cool the stator if is outside. If the sator is inside is more difficult to cool down. The draw-back is that you loose torque because you have a smaller diameter of the rotor. I opted for a 48 slots (teeth) and 40 magnets design and i will have 142.5Nm of torque.
Nominal Power: 45KW
Nominal Voltage: 230v
Nominal current:200A
Winding configuration : Delta
RPM: 2600
Torque 165Nm
Construction : 48 slot, 40 Magnets Neodymium
Lamination Grade M330
Cooling : Glycol
Weight: 17Kg
Copper weight ~ 2.7kg
Windings:
Can be : delta or Star ( WYE)
Delta connection will give you higher power per cooper amount, higher RPM, higher current, lower phase voltage.
STAR will give you lower RPM, higher torque (1,73 more than dela) , higher the voltage, lower the current.
Can be: concentrated or fractional slot type.
If there are concentrated can be: LRK, distributed LRK etc.
A good winding scheme calculator can be found here.
How to choose the magnets ?
After you choose the slots and poles, you need to choose the magnets. This is not very easy task because you need hi temperature magnets and are not so cheap and easy to find for your needed size. I bought custom made magnets from a Chinese website.
The temperature rating for Neodymium is only a guide value. The actual temperature where magnet start to loose strength is size, shape and magnetic circuit dependent. If you have a magnet attached to a piece of steel i will demagnetize at higher magnetic flux than in a free space. On the other hand demagnetization temperature will be lower if you subject the magnet to a strong opposite magnetic field such in a motor.
If the thickness of the magnet is bigger and you will need a bigger magnetic field to start demagnetize it.
Temperature classification for neodymium magnets, N stays from Neo from .
N42 ≤80℃
N42M ≤100℃
N42H ≤120℃
N42SH ≤150℃
N42UH ≤180℃
N42EH ≤200℃
N42VH ≤230℃
Neodymium magnets needs a coating otherwise they will rust in contact with air.
The coatings can be: Nickel, Zinc, Phosphate, Epoxy, Gold and others.
Mathematical magnetic flux density analysis.
Next step is to run mathematical analysis in magnetic field to see if i have some areas with saturated magnetic field. We want to avoid core saturation. For this i used Finite Element Method Magnetics ToolA Windows finite element solver for 2D and axisymmetric magnetic, electrostatic, heat flow, and current flow problems with graphical pre- and post-processorsWe can observe that i have areas in pink color with to much magnetic flux, above 2Teslas, so i need to increase the thickness of the tooth to stay under 2 Teslas because the saturation of the lamination.
Hall sensor spacing mechanical angle calculation formula:
360*2/ 6* pole pairs number
6 is coming from 6 step commutation in the controller.
Example. 14 magnets motor means 7 pole pairs
So the resulting angle between two hall sensors is Hα=360*2/ 6* 7= 11,14 degree.
For 20 magnets motor mean 10 pole pairs.
resulting Hα= 360*2/6*10= 12 degrees
Multiple factors can have a huge difference in motor performance and efficiency:
This factors can be:
1. Maximum working frequency (depending on RPM and no. of poles). The frequency is calculated by next formula:
f= rps (motor rotation per second) x (nr. of poles/2). no.of poles is equal with no. of magnets.
or: f[hz]= Magnets nr. x rpm / 120
Example for 1000Rpm: the rps will be 1000rpm/60s = 16,66 then f=16,22 x 40poles/2 will result in: f= 333.2Hz
Because the losses in the core lamination are increasing with increase (non linear) in frequency we want to have a frequency as low as possible for max motor RPM. For exampe for lamination grade M330-50 the losses at 50Hz and 1Tesla are 1,29W/kg but 132W/kg at 1000Hz.
2. Proper combination between slots and poles count.
3. Material properties and thickness of stator and rotor laminations.
4. Air gap thickness.
5. Magnets grade.
6. Current density.
7. Slot fill factor.
8. Cogging torque. A summary of techniques used for reducing cogging torque:
Skewing stator stack or magnets
Using fractional slots per pole
Modulating drive current waveform
Optimizing the magnet pole arc or width
Brushless motor simulation 45KW 0.2mm lamination and 0.75mm airgap
Brushless motor simulation results
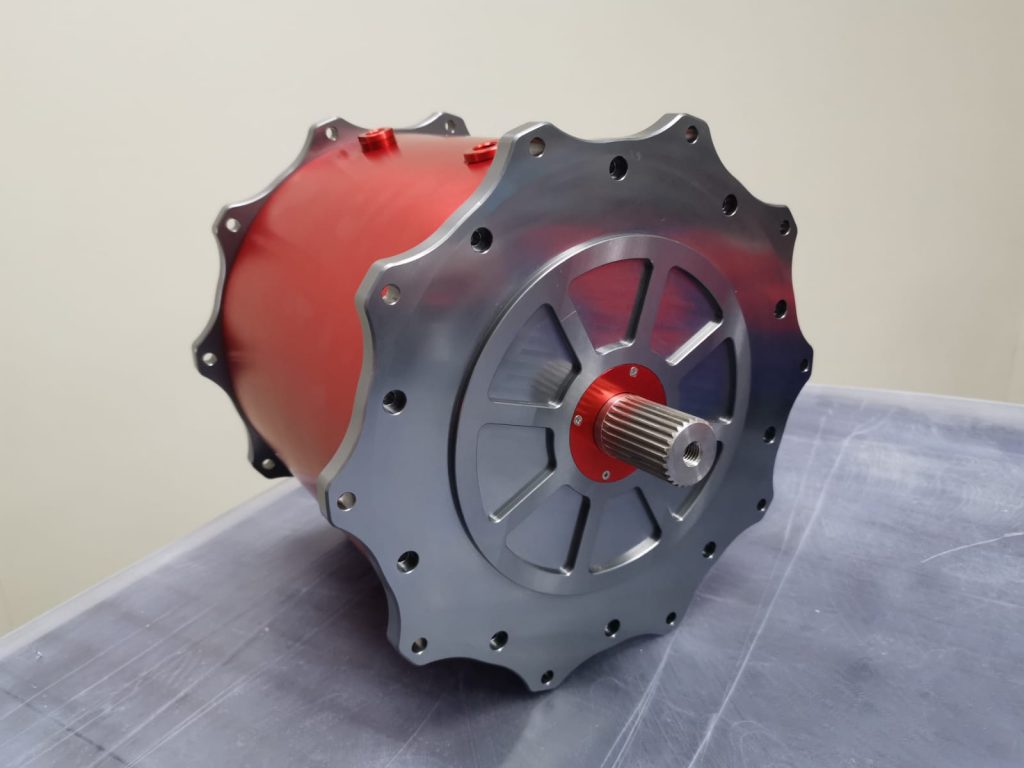
The final motor without the caps.
The motor with the caps and without the ball bearings.
I have also an YouTube video to present the 3D model.
Design stage
Close up view of the coils, magnets.
Air gap 0.75mm
Custom Magnets received and tested by heating up to 120 Celsius to see if any drop in magnetic field occurs.
In the last 6 months i`m working at my electric car conversion. The car was in good shape and was a good candidate for the conversion. After i found a place where to work to the car (a garage) i took out the ICE and i begun to measure all the interior spaces to see if the motor will fit. Today (27.07.2013) i did the first test on the electric motor to see if the motor fits ok inside and join well the gear box.
After i removed the engine i start taking measurements for creating the mounting plates.
The car with the engine removed. Now i have space to work.
This motor is a Permanent Magnet Dc motor with 100Nm and 1900RPM total power will be limited to ~ 20Kw depending on how i will manage to remove the heat from the motor.
I also received the Batteries: Model : A123 Systems. Capacity : 20Ah Nominal voltage 3.3v Continuos Discarge 600A Puls discharge 1200A Total number of cells in series : 72
As the DC motor Controllers are to expensive for my budget, and i have experience in electronics i designed my own pwm controller using Eagle Cad program.
Specs: Max voltage: 400V Max current: 200A Adjustable current limitation feature, Undervoltage lockout, thermal shut down, curent sense.
New 30 A123 Systems cells arrived.
The mounting plate for 24 cells in series
The schematic and PCB where designed in Eagle cad.
This is the power module formed by 10 mosfets 500V 32A in parralel.
Now new Toyota Prius first generation IGBT module arrived from ebay.
The internal schematic, Each igbt inside has 27nF gate capacitance.
This is the best cheapest DC motor speed controller circuit that you can find on internet.
In the past i tried wit NE555 and other circuits but the results were every time in shorted mosfet`s 😀 and not stoppable GO KART (not very good thing when you do not have a big red kill switch).
In in the following i will present my DC Motor speed controller capable of adjusting speed (PWM) form 0 – 100% and the frequency form ~ 400Hz to 3kHz, based on LM339 comparator.
The power supply is from 14-30volts, expandable to practical any value with little modification.
From R15 VR 10k you can adjust the speed from 0 -100%
From R14 VR 100k you can adjust the frequency.
If the jumper JP1 is shorted you can adjust the PWM frequency from 400Hz to 3kHz. If jumper is open Freq is fixed at 100Hz.
The circuit is designed in Eagle cad 6.2
You can use almost any Channel N mosfet`s you want. The fets will be mounted on a radiator if the current is higher than 2-5 amp.
It is possible to increase the voltage supply to any value if you separate the power to the logic circuit from power to the load and mosfet`s
This is my second prototype of dc motor controller
Depending on Rds ON value of the mosfet`s you will need a smaller or bigger radiator.
The wires will be at least 12 AWG for a 30 -35 amp load.
For any questions you can ask me any time via my e-mail found on about menu.
Success with the circuit.
This is the real life testing of the circuit.
High quality improved PWM controller based on MC33035 IC.
Schematic :
Eagle 6.1 design.
I used as mosfet driver the TC4452 IC with is capable of 12Amp output.
I used this schematic in conjunction with power stage formed by 10 mosfets in parralel with all gate connected via 10pcs 20 ohm resistor to the output of the IC driver.
For current sense circuit i used allegro sensor ACS758
50-200A current sensor IC
The Allegro CA and CB package current sensor ICs are fully integrated current sensor solutions. They contain the primary conductor, concentrating ferromagnetic core and the analog output Hall-effect linear in a single IC package. The conductor resistance is a typical of 100 µΩ for ultra low power loss when sensing current up to 200 A. These sensors are automotive grade devices that can take the heat and deliver highly accurate open loop current sensing in the most harsh applications environments.
The Allegro medium current devices are much smaller than bulky current transformers and have the added advantage of sensing both AC and DC currents. The package design also provides galvanic isolation to 3000 VRMS and can be used in many line side applications.





















































































































 The Allegro CA and CB package current sensor ICs are fully integrated current sensor solutions. They contain the primary conductor, concentrating ferromagnetic core and the analog output Hall-effect linear in a single IC package. The conductor resistance is a typical of 100 µΩ for ultra low power loss when sensing current up to 200 A. These sensors are automotive grade devices that can take the heat and deliver highly accurate open loop current sensing in the most harsh applications environments.
The Allegro CA and CB package current sensor ICs are fully integrated current sensor solutions. They contain the primary conductor, concentrating ferromagnetic core and the analog output Hall-effect linear in a single IC package. The conductor resistance is a typical of 100 µΩ for ultra low power loss when sensing current up to 200 A. These sensors are automotive grade devices that can take the heat and deliver highly accurate open loop current sensing in the most harsh applications environments.